-
-
手机阅读
工业机器人最早应用于汽车制造领域,但技术发展至今,工业机器人的应用早已不局限于某个领域,现代工业的方方面面都有工业机器人的身影。工业机器人由主体、驱动系统和控制系统三个基本部分组成。工业机器人的分类方式很多,可以按机械结构、操作机坐标形式和程序输入方式等进行分类,下面就盘点一下工业机器人的种类:
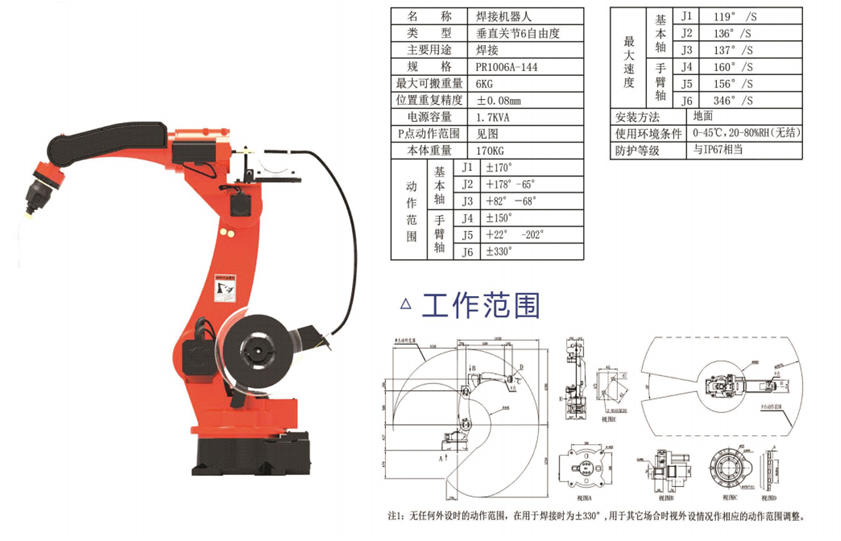
1.关节机器人
关节机器人也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一。适合用于诸多工业领域的机械自动化作业,比如,自动装配、喷漆、搬运、焊接等工作。机器人前3个关节决定机器人在空间的位置,后3个关节决定其姿态,多以旋转关节形式构成。
2.直角坐标机器人
也称桁架机器人或龙门式机器人。是能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。其工作的行为方式主要是通过完成沿着X、Y、Z轴上的线性运动。特点:简单,控制方便,占地空间大。
3.串联和并联机器人
串联机器人其串联式结构是一个开放的运动链,其所有运动杆并没有形成一个封闭的结构链。串联机器人的工作空间大,运动分析比较容易可以避免驱动轴之间的耦合效应。但其机构各轴必须要独立控制,并且需要搭配编码器和传感器来提高机构运动时的精准度。
而并联机器人和传统工业用串联机器人在应用上构成互补关系,它是一个封闭的运动链。并联机器人不易产生动态误差,无误差积累精度较高。另外其结构紧凑稳定,输出轴大部分承受轴向力,机器刚性高,承载能力大。但是,并联机器人在位置求解上正解比较困难,而反解容易。
4.平面SCARA机器人
平面内运动,结构简单,性能优良,运算简单,适于精度较高的装配操作;SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。这类机器人的结构轻便、响应快,最适用于平面定位,垂直方向进行装配的作业。