-
-
手机阅读
生化反应池在水处理过程中非常重要。需要通过调整风机的转速控制反应池中的DO值。理论上应该通过调节电动机的转速来实现,但实际上却是利用挡板阀门后者放空的方法进行调节。这种方法极大地浪费了电力资源。以美国TI公司推出的TMS320LF2407为代表的面向电机控制的高性能数字信号处理可以对电机进行精确控制,大大提高了交流电机的性能,能够设计出性能优良的控制系统。同时,可编程逻辑器件特别是高密度可编程逻辑器件CPLD的出现,使得外围逻辑电路大大简化,增强了系统的可靠性。本文以TMS320LF2407为控制核心,辅以可编程器件及外围电路,设计异步交流电机的调速控制系统。
2 系统总体设计
2.1 变频方式的选择
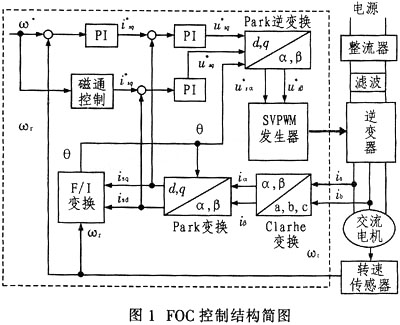
系统采用磁场定向矢量控制的方法对电机变频,又称FOC控制。其实质是将异步交流电动机等效直流电动机,将三相坐标系下的定子交流电流通过3/2变换,等效成两相静止坐标系下的交流电流,再通过转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流,相当于直流电动机的励磁电流和电枢电流,然后模仿直流电动机的控制方法,分别对速度、磁场两个分量进行独立控制,实现解耦控制,矢量控制可以从零转速起进行速度控制,即使低速亦能运行,调速范围广;可以对转局实行精确控制;系统的动态响应速度非常快;电动机的加速特性很好。FOC控制结构简图如图1所示。
2.2 控制方案
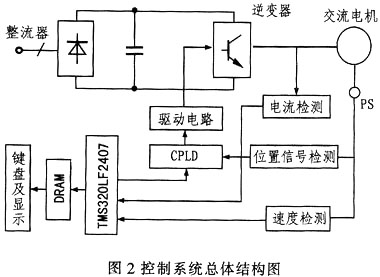
控制系统总体结构如图2所示,主要由DSP基本模块、CPLD换相模块、位置传感器模块、电流检测装置、IGBT驱动电路、键盘及显示电路组成。
-
-
-
jhlu3 发表于 2009/7/2 8:54:10
3 系统主要模块设计2楼 回复本楼3.1 DSP主控模块
电机控制专用定点器件TMS320LF2407的特点是:采用双总线的哈佛结构;四级流水操作;专用的硬件乘法器;内部32 KB的Flash程序存储器、高达1.5 KB的数据/程序RAM、544 KB双口RAM和2KB单口RAM。两个时间管理器模块EVA和EVB,均包括两个16位通用定时器和8个16位脉宽调制(PWM)通道。它们能够实现:三相反相器控制;PWM的对称和非对称波形;当外部引脚PDPINTx为低电平时,快速关闭PWM通道;可编程的PWM死区控制可防止上下桥臂同时输出触发脉冲;3个捕获单元;片内光电编码接口电路;16通道A/D转换器。这些资源为电机控制提供了极大便利。
本系统DSP主要用来生成PWM波,DSP通过速度环与电流环调节PWM的占空比实现对转速的控制。指定转速通过键盘模块输入,键盘输入模块和显示电路通过双口RAM与DSP实现数据的交换。键盘无输入时,DSP不断向双口RAM写入数据,显示电路从双口RAM读出数据并显示出来;键盘有输人时,先发信号给DSP,DSP停止向双口RAM写入数据,待键盘数据输入后,再发中断信号给DSP,DSP从双口RAM读入指定的转速。
电机的速度检测通过对CPLD送至DSP的CAP/QEP单元的信号的上下沿的检测来实现,由于电机两相间的位置固定,根据两次脉冲的时间差,经过简单的计算即可得到电机的速度。DSP将输入的指定转速与测得的反馈转速相减,根据偏差的大小采用一定的控制算法可实现电机速度环的控制。速度环的输出为给定电流。电机的绕组电流由电流检测模块送至DSP的。A/D转换器,根据给定电流与检测电流的差值同样采用PI控制算法即可实现对PWM占空比的调整,从而最终实现对转速的控制。
3.2 CPLD换相模块
CPLD采用Altera公司的MAX系列可编程逻辑器件EPM7256E。该器件基于电擦除EEPROM,可重复编程100次以上,具有较多的输入/输出引脚,基本满足多相电机换相控制的需要。开发工具为MAX PLUSII软件,可采用原理图设计、波形输入设计和文本输入设计,能根据指定的引脚配置自动生成熔丝文件,可采用JTAG方式对CPLD器件下载编程。
使用MAX PLUSII构建所需要的逻辑结构图,自动生成熔丝文件后对CPLD器件下载编程。CPLD器件的输入为位置传感器提供的位置信号、DSP给出的PWM脉宽调制信号和确定电机旋转方向的信号,器件的输出为各个IGBT驱动模块的控制信号。采用CPLD进行换相,CPLD的复位引脚单独接一复位开关,当DSP复位时,并不影响CPLD进行换相,使得换相非常可靠,能始终保持电机运行在正确的相序,增强了系统的抗干扰能力。另外,将电机的换相信号通过CPLD的一个输出引脚送至DSP的一个CAP/OEP单元,电机换相时,此信号的高低电平将发生变化,DSP的CAP/OEP单元通过检测电平上下沿的变化来计算转速。位置的检测采用光电编码器,CPLD换相模块根据光电编码器的输出信号即可判断转子的位置和转子的转速。
3.3 IGBT驱动模块
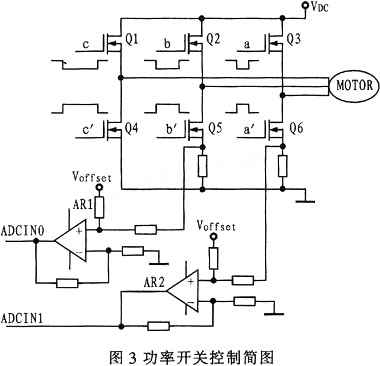
电机电枢绕组的连接采用H桥形,功率开关采用IGBT,主电路的结构如图3所示。IGBT的驱动采用日本富士通公司为其3 000 A/1 200 V快速型IBGT产品配套的专用驱动模块EXB841来实现。整个电路信号延迟时间不超过1μs,最高频率可达50kHz,并具有过流及慢速关断功能。当发生过流时,电路将低电平信号送至DSP的PDPINT保护引脚,从而封锁PWM脉冲的输出,避免系统发生大的故障。
3.4 电流检测
当逆变器驱动一个三相电动机负载时。可以测量三相定子电流Ia、Ib和Ic。三相绕组采用星形连接,只要知道其中两相电流Ia、Ib,另一个变量Ic就可以根据公式Ia+Ib+Ic=0算出。
电流检测采用两个线性电阻对其中两相电流进行采样,采样电阻上的分压被运放到0 V~+3.3V,然后信号被送到DSP的ADC模块,在每个PWM周期都被转换成数字量。由于选定的电阻是精确的,因此可以得到电流的精确采样值。
4 在水处理过程控制中的应用
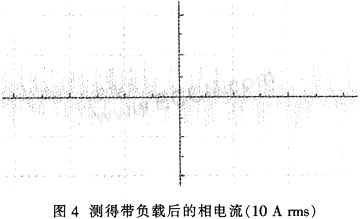
将所设计的控制系统应用于水处理过程控制中进行测试,控制系统的速度环和电流采用常规的PID控制,将控制器通过IGBT模块直接驱动电机,该电机为三相交流异步电机(380 V,30 KW),定子线圈采用星形接法,使用TDS340A(100 MHz)示波器。
启动交流电动机,测得带负载的电流波形如图4所示。可以看出,控制板输出了可调制的较好的PWM信号,电机相电流基本按正弦波形变化,波动较小,体现了良好的动态性能。电动机在实际运行过程中调速效果好,系统运行平稳。
5 结束语
基于DSP+CPLD的交流电动机控制系统充分利用了DSP的强大运算能力,能够采用复杂的控制算法对电机进行控制,同时内部集成了诸多功能,配合可编程器件可以使系统的外围逻辑电路大大简化,实现了水处理系统的控制。
引用 jhlu3 2009/7/2 8:54:10 发表于2楼的内容
-