-
-
手机阅读
交流伺服控制基本方案提纲
交流电机有交流感应电机和交流同步电机之分。交流感应电机结构简单容量大、价格低,一般用作主运动的驱动电机。永磁同步交流伺服电机用作进给运动的驱动电机,其结构示意如图4—45所示。电机由定子、转子和检测元件组成。定子1由冲片叠成,其外形呈多边形,没有机座,这样有利于散热。在定子齿槽内嵌入某一极对数的三相绕组4。转子2也由冲片叠成,并在其中装有永久磁铁3,组成的极对数与定子的极对数相同。永久磁铁有:铝镍钴合金、铁淦氧合金和钕铁硼合金即稀土永磁合金等,以稀土永磁合金的性能最好。检测元件5一般都用脉冲编码器,也可用旋转变压器加测速发电机,用以检测电机的转角位置、位移和旋转速度,以便提供永磁交流同步电机转子的绝对位置信息、位置反馈量和速度反馈量。
1 选择交流伺服的优势
1.1 交流伺服电机和步进电机比较
a. 控制精度不同
两相混合式步进电机步距角一般为3.6°、1.8°,三相混合式步进电机其步距角可通过拨码开关设置为0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°等等,兼容了两相和五相混合式步进电机的步距角。
b. 低频特性不同
步进电机在低速时易出现低频振动现象。交流伺服电机运转非常平稳,即使在低速时也不会出现振动现象。
c. 矩频特性不同
步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
d. 过载能力不同
步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。
e. 运行性能不同
步进电机的控制为开环控制。交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环。
f. 速度响应性能不同
步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能较好,以某品牌400W交流伺服电机为例,从静止加速到其额定转速3000RPM仅需几毫秒,可用于要求快速启停的控制场合。
1.2 交流伺服电机和直流伺服电机比较
直流伺服电机在数控进给伺服系统中曾得到广泛的应用,它具有良好的调速和转矩特性,但是它的结构复杂、制造成本高、体积大,而且电机的电刷容易磨损,换向器会产生火花,使直流伺服电机的容量和使用场合受到限制。交流伺服电机没有电刷和换向器等结构上的缺点;并且随着新型功率开关器件、专用集成电路、计算机技术和控制算法等的发展,促进了交流驱动电路的发展,使得交流伺服驱动的调速特性更能适应数控机床进给伺服系统的要求。现代数控机床都倾向采用交流伺服驱动,交流伺服驱动大有取代直流伺服驱动之势。
2交流伺服电动机基本控制原理
交流电动机的转速n,与交流电源频率f,电机极对数P以及转速滑差率S之间的关系为:
n = 60f(1-S)/P (2 -1)
对于异步电机S不等于0,对于同步电机则S=0。由式(2—1)可知,改变电源的频率f,电机的转速n与f成正比例变化。电机定子绕组的反电势为:
E = 4.44 fWKφ
如果略去定子的阻抗压降,则定子相电压
U ≈ E = 4.44 fWKφ
上式说明,若相电压U不变,则随着频率/的升高,气隙磁通中将减小。又从转矩公式
M = CMφI2COSφ
可以看出,φ值减小,电机转子的感应电流I2也相应减小,势必导致电机的允许输出转矩M下降。另外,若相电压U不变,随着f的减小,气隙磁通φ将增加,这会使磁路饱和,激磁电流上升,导致铁耗剧增,功率因数下降。因此改变频率f进行调速时,需要同时改变定子的相电压U,以维持φ值接近不变,从而使M也接近不变。可见交流伺服电机变频调速的关键问题是要获得调频调压的交流电源。
调频调压电源有很多种。通常采用交流一直流一交流的变换电路来实现,这种电路的主要组成部分是三相电流逆变器。
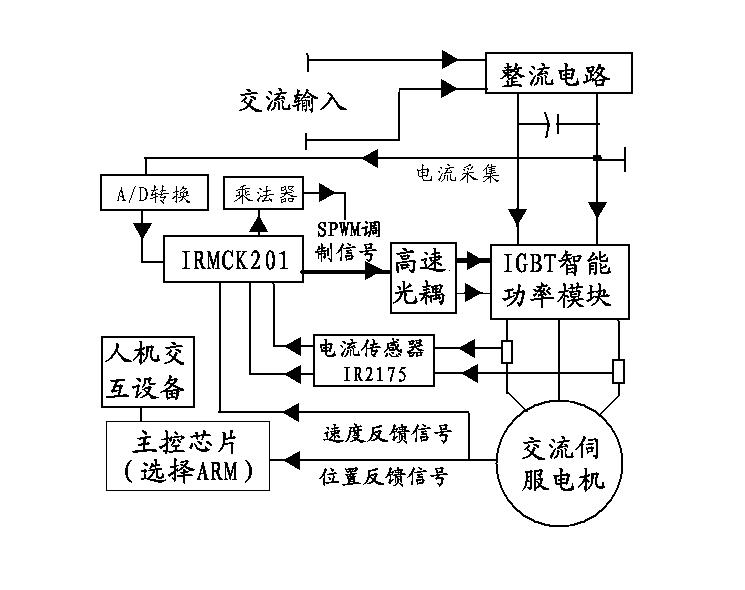
3交流伺服电动机控制电路组成
此主题相关图片如下,点击图片看大图: