-

-
-
xiaohaitao | 当前状态:在线
总积分:71 2025年可用积分:0
注册时间: 2012-11-22
最后登录时间: 2013-04-08
-
-
船舶电力推进系统制动回馈能量建模与分析
xiaohaitao 发表于 2012/11/22 13:48:32 1187 查看 0 回复 [上一主题] [下一主题]
手机阅读
摘要:船舶电力推进系统制动时会产生很大的回馈能量,通常采用制动电阻进行处理,但制动电阻的设计功率往往采用准确度较差的经验估算方法。为此,本文提出一种新的考虑船舶阻力损耗的船舶电力推进系统制动回馈能量的设计方法,提出影响制动能量大小的多种影响因素,
并基于 MATLAB/GUI 建立了船舶电力推进系统制动能量回馈数字仿真系统,仿真结果证明了其有效性。
1. 引言
面向海洋领域的电力推进系统无论是民用还是军用都在快速发展中。用电气网络代替原动力和驱动力之间的机械耦合,这种替代降低了燃料消耗、提高了动态性能、增强了可靠性、降低了维护成本,而且为船体结构设计提供了很大的灵活性。
对于交直交电压源型变频器驱动的船舶电力推进系统而言,在制动过程中电动机处于再生制动状态,电动机转子、螺旋桨和船体本身所存储的机械能是巨大的,可以转换成电能进行回馈,当这部分能量回馈到变频器直流侧电容C中时,会产生泵升电压,使直流母线电压上升。若这部分能量不及时处理就会引起变频器过压保护动作或造成主回路大功率器件的过压损坏。这样就需要制动电阻或其它能量处理模块对回馈的能量进行快速处理。在设计这些能量处理模块时,首先需要考虑船舶在制动过程中的能量回馈大小。目前国内外对这方面的研究比较少,文献[1]中仅仅以螺旋桨为研究对象研究制动能量的回馈值,而忽略了船型及其参数对制动能量回馈值的影响。文献[2]和文献[3]都在计算制动电阻阻值时,涉及到了计算制动能量,将船舶制动前后螺旋桨转速变化所引起的动能变化作为了制动能量回馈值,而忽略了所有损耗。文献[4]对通用变频器再生能量进行研究,没有针对复杂的
船舶电力推进系统中的制动能量进行研究。
针对以上研究的不足,本文对船舶电力推进系统制动能量回馈进行深入的分析和研究。提出一种新的考虑船舶阻力损耗的船舶电力推进系统制动能量回馈数值的设计方法,推出船舶参数与船舶制动能量回馈值之间的关系,对船舶制动过程中能量流动过程进行分析,确定其中的能量损耗组成,计算出船舶制动过程的总损耗,最终确定船舶电力推进系统制动能量回馈值。
2. 船舶制动能量损耗
2.1
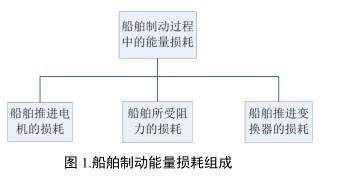
船舶制动能量损耗组成分析船舶制动时,控制驱动电机的转矩为负向转矩,带动螺旋桨减速至零,然后反转,产生制动力,船体在本身阻力和制动力作用下,逐渐减速,本身阻力做功以热能形式损耗掉,制动力做功将船体动能转化成电能,产生制动回馈能量。在制动能量回馈过程中,损耗的能量主要有三种:船体本身阻力损耗、船舶推进电机损耗和船舶推进变换器损耗,如图
1 所示,此外还包括传动机构机械损耗。其中,传动结构机械损耗、推进电机损耗和推进变换器损耗可以折算为推进器效率参数。
2.2 船舶制动过程中能量损耗计算方法
根据上述分析,传动结构机械损耗、船舶制动能量损耗中推进电机效率和船舶推进变换器的效率可作为已知参数,合成为推进器效率,而船体本身阻力损耗影响因素很多,也直接影响制动回馈能量值大小。
一、船体阻力
船舶阻力可以分为摩擦阻力和剩余阻力,其中摩擦阻力是其中的主要成分,大约占总阻力的 60%
-90%[5]。
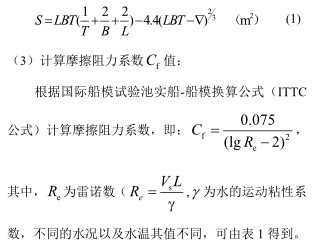
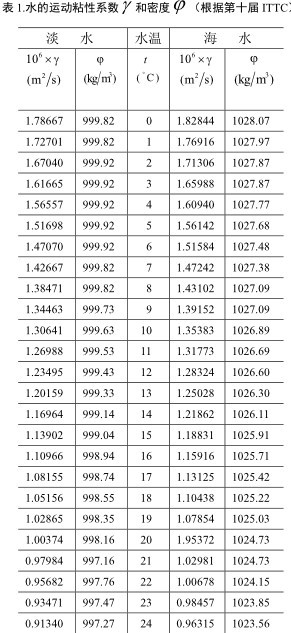
本文采用泰洛法求取船舶阻力[6]。
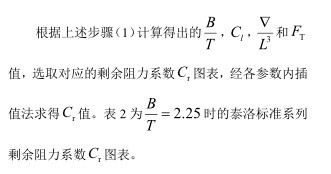
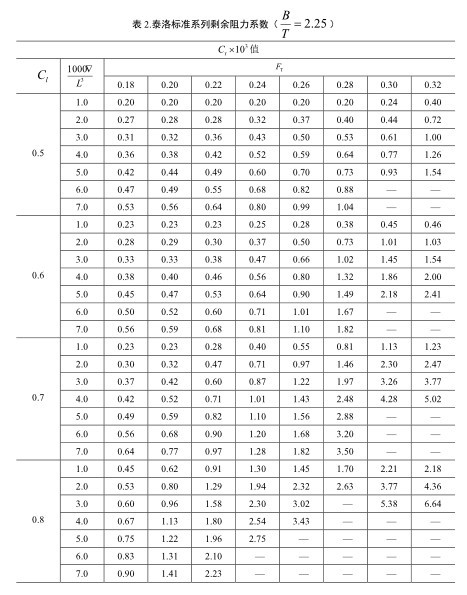
(2)求湿面积 S 值
本文采用减量法求船的湿面[7]。船尺度 L、B、T所围成的排水空间由五个平面组成,底板 LB、左右侧壁
LT、前后端板 BT,这五个平面的面积和就是船的基数湿面积,可推导出实际船的湿面积表达式:


3. 船舶制动回馈能量模型
由上述分析,
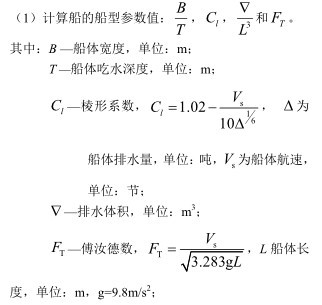
提出影响船舶制动回馈能量的因素:船体长度、船体宽度、船体吃水深度、船体排水量、船舶最大航速、船舶当前航速、船舶额定推进功率、螺旋桨直径、螺旋桨转速、螺旋桨个数、螺旋桨及电机等回转机构总转动惯量、船舶推进器的效率、推进电机制动转矩、船舶所处水域的水况(淡水或海水)
、船舶所处水域的水温。设船舶总的动能为sW , 可根据船型参数、 螺旋桨参数、设计速度和实际速度推出其值:
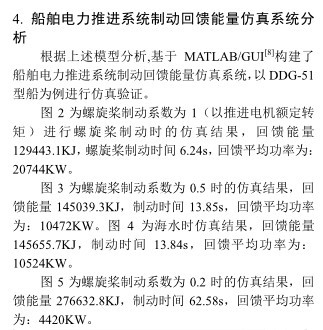

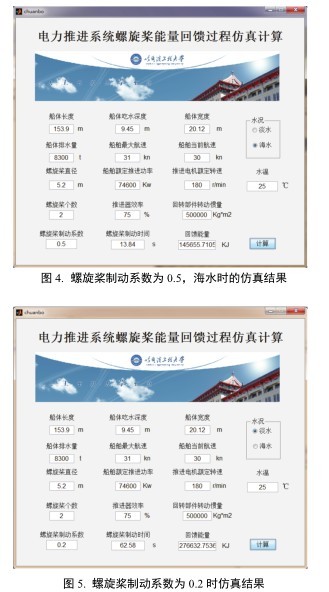
比较图 2-图
5,当制动系数减小时,螺旋桨制动时间增加,与上述理论分析一致:当螺旋桨制动时,控制驱动电机的电流反向,转矩为负,使螺旋桨制动减速,螺旋桨推力减小,当螺旋桨转速低于其拖桨转速时,螺旋桨推力为负,进一步使船制动,船体在本身阻力和制动力作用下,逐渐减速,本身阻力做功以热能形式损耗掉,
制动力做功将船体动能转化成电能,产生制动回馈能量,直到螺旋桨转速至零。制动系数越小,制动时间越长,回馈能量值越大,但回馈功率越小;制动系数高,则螺旋桨制动时间短,回馈能量值小,但回馈功率高,螺旋桨可快速反转,提供更高的制动力,加速船体制动,实现快速机动。这为回馈能量处理系统设计提供了重要理论依据,如制动电阻功率选择,储能电容容量选择等。
5. 结论
本文提出一种新的考虑船舶阻力损耗的船舶电力推进系统制动回馈能量的设计方法,提出影响制动回馈能量大小的多种影响因素,建立了船舶电力推进系统制动能量回馈模型及数字仿真系统,能够较准确计算出船舶制动过程中能量的回馈值,
证明了其有效性。
参考文献
[1] 乔鸣忠,张晓锋,朱鹏,蔡巍.变频器供电的船舶推进系
统制动过程研究.武汉理工大学学报,2009,33(5)
[2] 任洪莹, 冯惠, 任俊杰, 赖和里.船舶电力推进电动机能
耗制动电阻值研究.航海技术,2010(4)
[3] 毛伟,田淑杭,王迎杰.变频器制动单元和制动电阻的选
型分析.冶金自动化,2008
[4] 刘柏林.变频器再生能量的利用.电气自动化,1997
[5] M. TAYLAN. an overview: effect of roughness and
coatings
on ship resistance .INTERNATIONAL CONFERENCE
ON SHIP DRAG REDUCTION SMOOTH-SHIPS,
Istanbul, Turkey, 2010.5
[6] 邵世明、赵连恩、朱念昌.船舶阻力.北京:国防工业出版
社,1995.4
[7] 曾祥华,王介文.减量法求船舶湿面积.武汉造船,1997
(3)
[8] 陈垚光.精通 MATLAB GUI 设计.北京:电子工业出版
社,2008
作者简介:
赵凯岐(1975-) ,男,博士,副教授,研究方向
为电力电子技术及应用,电磁驱动控制技术,电力传动
自动化与智能系统;Email: zhaokaiqi@hrbeu.edu.cn
齐志远 (1985-), 男, 硕士研究生。
来源:中国电力电子产业网讯http://www.p-e-china.com