-
-
手机阅读
-
-
-
wangchen 发表于 2010/4/8 15:00:59
2楼 回复本楼这个问题的实质,是关于PID控制系统的质量指标问题。本文讨论只针对简单、定值控制系统。PID控制系统最早称为PID自动调节系统。
图1是大家所熟悉的PID控制系统方块图,图1中每个方块代表控制系统的一个组成部分,从图1可看出系统中各组成部分的相互关系和影响。即PID控制系统是具有被调参数负反馈的闭环系统。当被控量y受到干扰的影响而升高时,反馈信号z将高于给定值x,经过比较而到放大调节元件去的偏差信号e将为负值,调节元件将发出信号而使执行元件动作,其作用方向为负,使被控量下降,这就达到了自动控制的目的。
此主题相关图片如下,点击图片看大图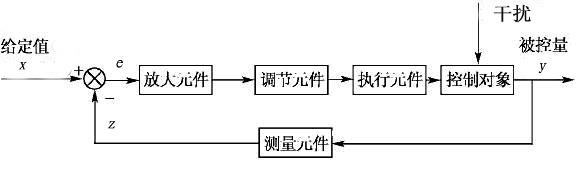
当一个PID控制系统的给定和干扰恒定不变时,整个系统处于一种相对的平衡状态,即测量元件、放大调节元件、执行元件都暂不动作,系统的输出信号也处于相对静止状态,即被控量不随时间而变化的平衡状态称为系统的静态。但由于干扰的作用而破坏了这种平衡状态,被控量就会改变,自控装置就会改变调节参数以克服干扰的影响,并力图使系统恢复平衡状态。从干扰的发生到系统重新建立平衡,在这一段时间中,整个系统的各个环节和参数都处于变动状态之中,所以这种状态叫做动态。PID控制系统在动态时,被控量是不断变化的。它随时间而变化的过程称为PID控制系统的过渡过程。也就是系统从一个平衡状态过渡到另一个平衡状态的过程;也就是不断克服干扰影响的过程。
PID控制系统在设计、整定和运行中,衡量系统质量的依据就是系统的过渡过程。当系统的输入为阶跃变化时,系统的过渡过程大多表现形式为振荡过程,如:发散振荡、等幅振荡、衰减振荡、单调过程等等形式。但在大多数情况下,都希望得到衰减振荡这种过渡过程,因为它是用来衡量系统质量的依据。
图2是过渡过程质量指标示意图,也是干扰作用影响下的过渡过程。用过渡过程衡量系统质量时,常用的指标有:
衰减比 也就是前后两个峰值的比。如图2中的B:B'习惯上表示为n:1。
余差 就是过渡过程终了时的残余偏差,如图2中的C。
最大偏差 即第一个波的峰值,如图2中的A,有时也用超调量来表示被调参数的偏离程度。
过渡时间 从干扰发生起至被调参数又建立新的平衡状态止这一段时间。
振荡周期 过渡过程从第一个波峰到二个波峰之间的时间。
振荡次数 过渡时间内被调参数振荡的次数。
此主题相关图片如下,点击图片看大图: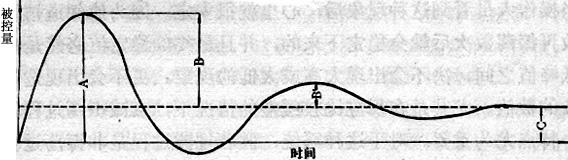
衡量一个PID控制系统质量的好坏,主要是看在外界干扰产生后,被控量偏离给定值的情况,假如偏离了以后能很快的平稳的回复到给定值,就认为是好的。通常认为图2所示的过渡过程是最好的,并以此作为衡量PID控制系统的质量指标。选用这个曲线作为指标的理由是:因为它第一次回复到给定值较快,以后虽然又偏离了,但是偏离不大,并经过几次振荡就稳定下来了,定量的看:第一个波峰B的高度是第二个波峰B'高度的四倍,所以这种曲线又叫做4:1衰减曲线。在调节器的工程参数整定时,以能得到4:1的衰减过渡过程为最好,这时的PID控制参数可叫最佳参数。
“理想曲线两个波,前高后低4比1”就是指图2这样的曲线,也就是过渡过程振荡两次就能稳定下来,并且振荡两次后有约近于4:1的衰减比,它被认为是最好的过渡过程。
引用 wangchen 2010/4/8 15:00:59 发表于2楼的内容
-